
Independent problem solver with experience leading research and development – from conception to implementation – of cutting-edge algorithms for privacy in optimal control and learning from demonstrations. Has more than 5 years of experience in non-linear control and estimation algorithms.
Fast learner with practical knowledge of:
- nonlinear optimization
- motion planning algorithms
- probabilistic robotics
- deep learning
- computer vision
- reinforcement learning.
Has a vast experience of clearly communicating technical ideas and a demonstrable track record of publications in major journals and conferences in control theory. Adept in the modern software engineering tools and practices.
Research
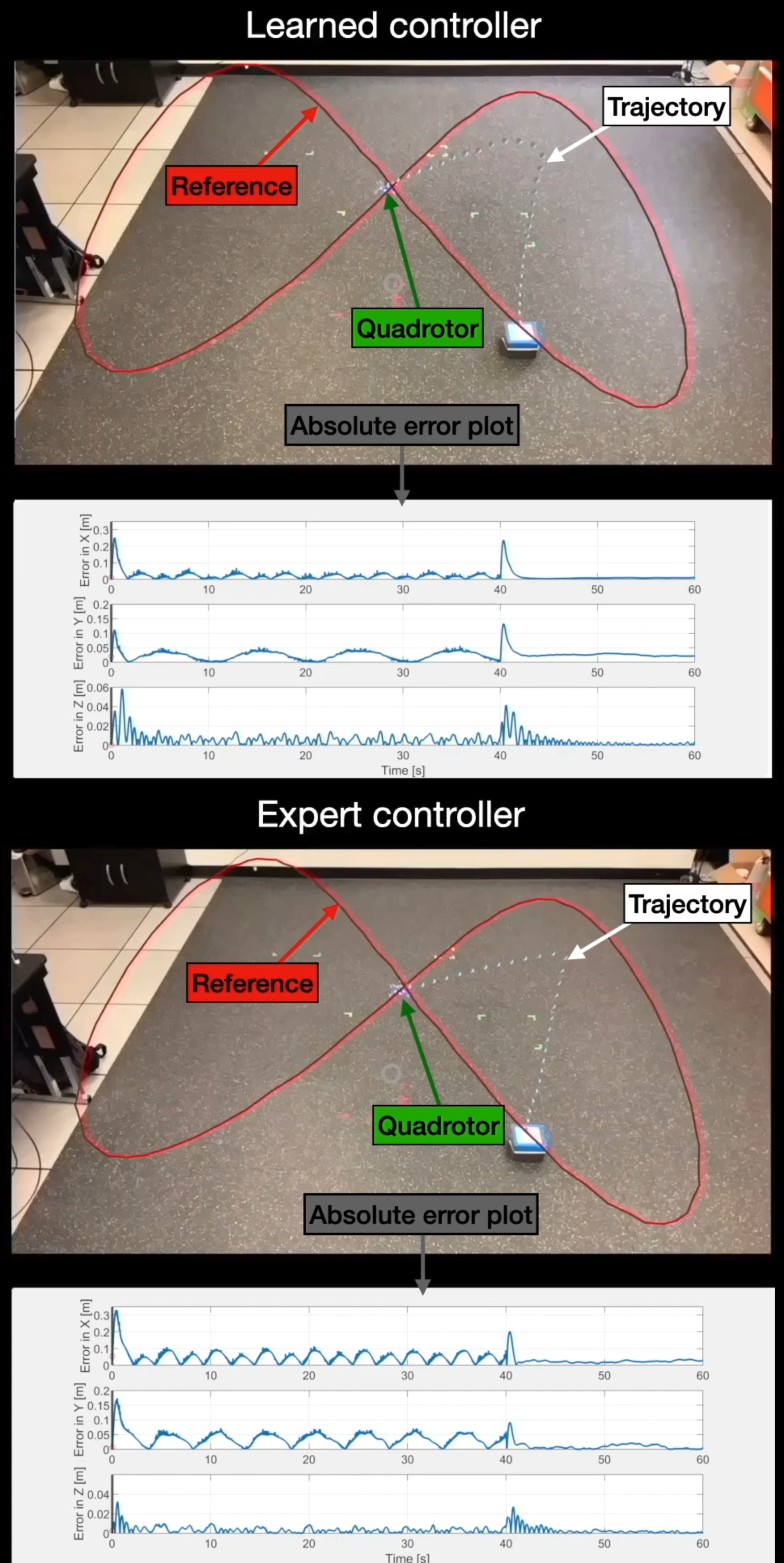
Learning Control From Expert Demonstrations
(joint work with L. Fraile, L. Pannocchi, and P. Tabuada)
We revisit the problem of learning a stabilizing controller from a finite number of demonstrations by an expert. The proposed algorithm requires only n+1 expert demonstrations, where n is the number of states of the system being controlled. When we have more than n+1 demonstrations, at every time interval, we can choose the best n+1 demonstrations to approximate the stabilizing controller in the best way. The feasibility of the proposed algorithm is experimentally demonstrated by applying it on a CrazyFlie 2.0 quadrotor.
Keywords: learning from demonstrations, imitation learning, motion control, computational geometry
Technical skills: ROS, C++, Python, MATLAB, Simulink, Git
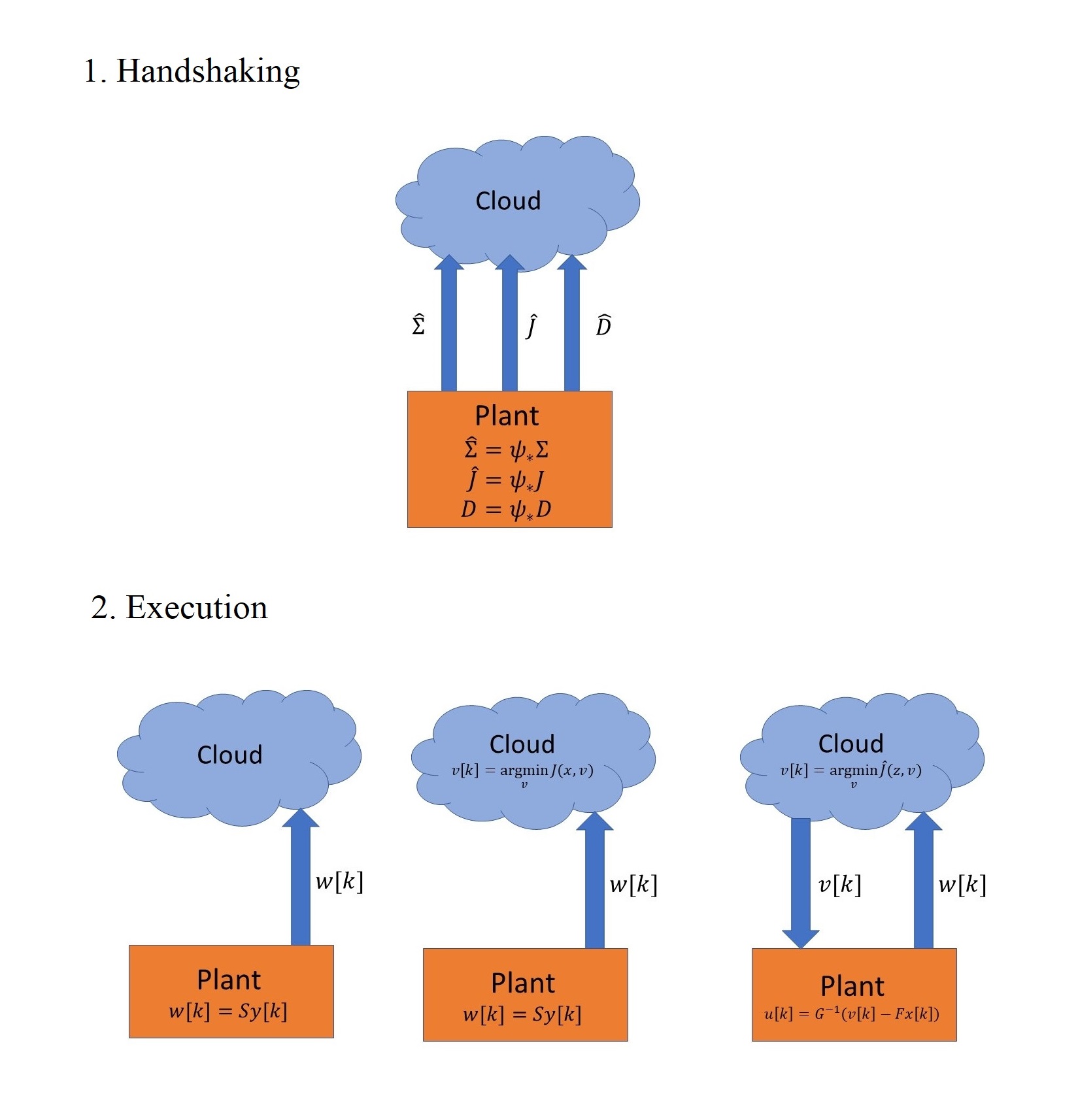
Privacy in Control Over the Cloud
(joint work with P. Tabuada)
Cloud computing platforms are being increasingly used for closing feedback control loops, especially when computationally expensive algorithms, such as model-predictive control, are used to optimize performance. Outsourcing of control algorithms entails an exchange of data between the control system and the cloud, and, naturally, raises concerns about the privacy of the control system’s data (e.g., state trajectory, control objective). We propose several transformation-based methods for enforcing data privacy. We also quantify the amount of provided privacy and discuss how much privacy is lost when the adversary has access to side knowledge.
Keywords: data privacy, optimization, predictive control
Technical skills: MATLAB, Simulink
Publications
A. Sultangazin, L. Fraile, and P. Tabuada, “Exploiting the experts: Learning to control unknown SISO feedback linearizable systems from expert demonstrations,” 2021 IEEE Conference on Decision and Control (CDC). Link
A. Sultangazin and P. Tabuada, “Symmetries and isomorphisms for privacy in control over the cloud,” in IEEE Transactions on Automatic Control, vol. 66, no. 2, pp. 538-549, Feb. 2021. Link
A. Sultangazin, S. Diggavi and P. Tabuada, “Symmetries and Privacy in Control Over the Cloud: Uncertainty Sets and Side Knowledge,” 2019 IEEE Conference on Decision and Control (CDC), Nice, France. Link
A. Sultangazin, S. Diggavi and P. Tabuada, “Protecting the Privacy of Networked Multi-Agent Systems Controlled over the Cloud,” 2018 27th International Conference on Computer Communication and Networks (ICCCN), Hangzhou, China, 2018, pp. 1-7. Link
A. Sultangazin and P. Tabuada, “Towards the use of Symmetries to Ensure Privacy in Control Over the Cloud,” 2018 IEEE Conference on Decision and Control (CDC), Miami Beach, FL, 2018, pp. 5008-5013. Link
A. Sultangazin, J. Kusmangaliyev, A. Aitkulov, D. Akilbekova, M. Olivero and D. Tosi, “Design of a Smartphone Plastic Optical Fiber Chemical Sensor for Hydrogen Sulfide Detection.” IEEE Sensors Journal, 17(21): 6935-6940, 2017. Link
Selection of previous projects

AlphaPilot AI Drone Innovation Challenge
(as a member of the team Formula Drone)
Finished as the top qualifier among 424 teams, ahead of numerous teams and research groups. Worked on the design of the AI framework, written in C++ and powered by NVIDIA Jetson, that can pilot racing drones through aerial courses at high speed without GPS, data relay or human intervention. I designed algorithms for optimal trajectory generation and obstacle avoidance. Was involved in development of the perception system, more specifically, during data collection and integration of the neural network with NVIDIA Jetson.
Keywords: optimal trajectory generation, obstacle avoidance, control barrier functions, neural networks, object detection
Technical skills: ROS, C++, Python, MATLAB, ACADO, qpOASES, TensorFlow, NVIDIA TensorRT, Git
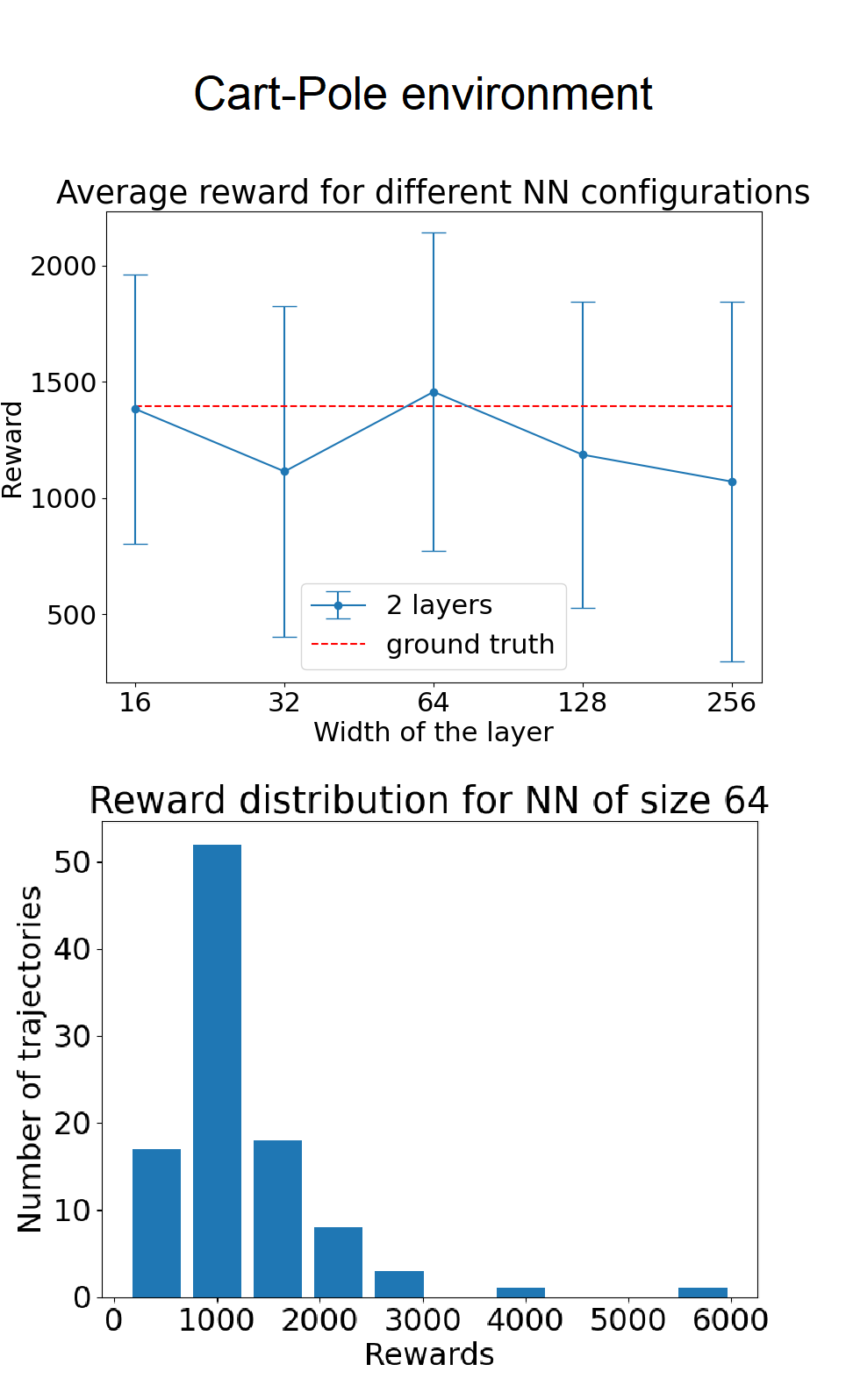
Learning to Control Mechanical Systems
(joint work with M. Marchi, M. Lucas, and L. Fraile)
We want to understand trade-offs inherent in applying learning-based control strategies to standard control problems, solvable with classical techniques. To this goal, we study the performance of Model-Based Deep Reinforcement Learning (MB-DRL) and Generative Adversarial Imitation Learning (GAIL) in mechanical environments from OpenAI Gym. For the limited number of environments we tested, we conclude that GAIL outperforms MB-DRL. In the case of the model-based algorithm we believe that we can improve its performance by changing the way the optimal action is chosen and by improving the policy with model-free methods.
Keywords: reinforcement learning, imitation learning, model predictive control
Technical skills: PyTorch, OpenAI Gym
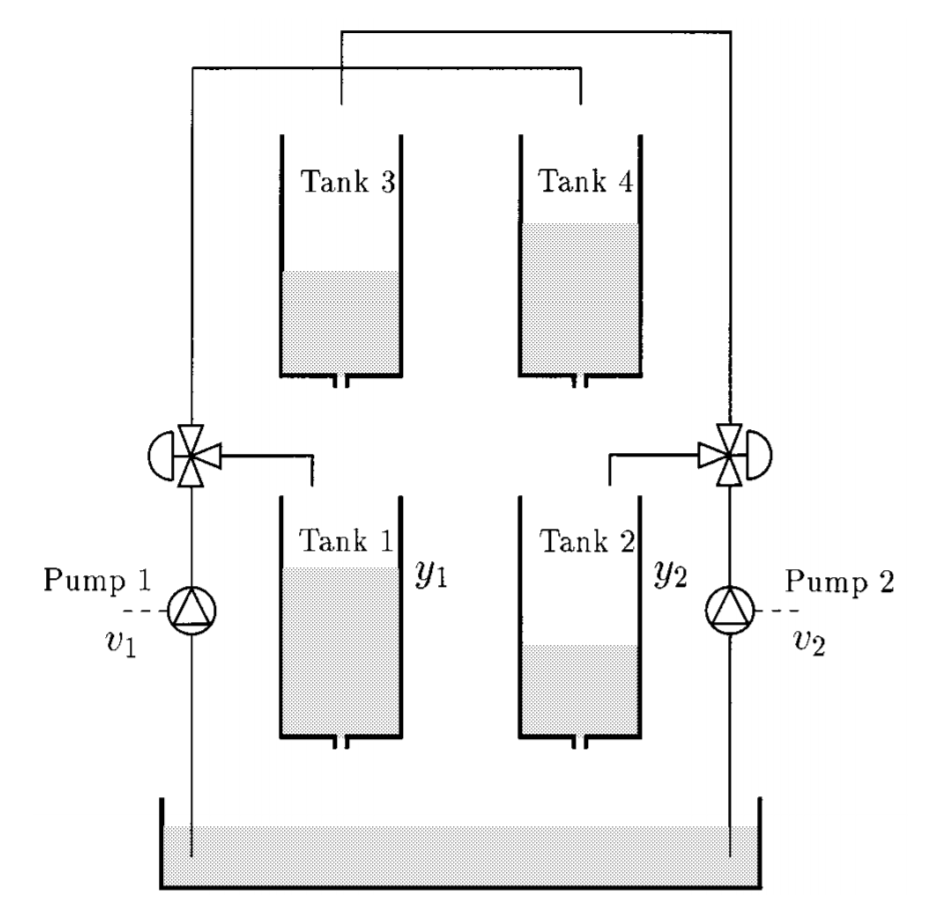
Algorithms for Distributed Model Predictive Control
(joint work with L. Fraile)
In this project we consider two state-of-the-art algorithms for solving distributed model predictive control (DMPC) problems. The first algorithm utilizes dual decomposition and accelerated gradient methods in a distributed fashion. The second algorithm uses alternating direction method of multipliers (ADMM) on the primal problem. We implement the three aforementioned algorithms and compare their results with those given by CVX. These algorithms were tested on the quadruple-tank process system. We evaluate the algorithms based on their convergence to the solution.
Keywords: optimization, model predictive control, gradient methods, ADMM
Technical skills: MATLAB, Simulink
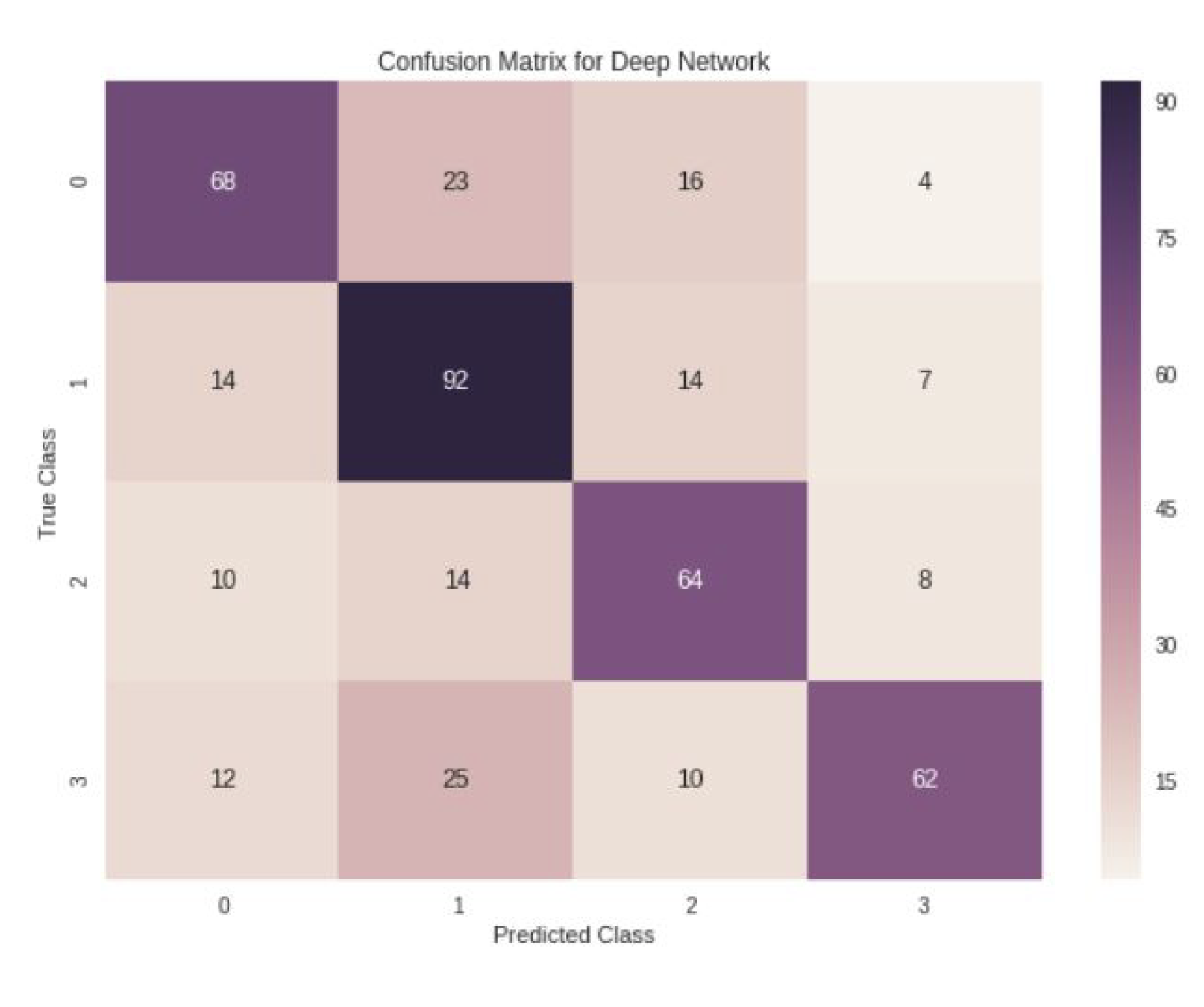
Task Classification of EEG Data with Neural Networks
(joint work with T. Le, H. Unal, H.-C. Hung)
In brain-computer interfacing, there has been an increased interest in the problem of end-to-end electroencephalogram (EEG) signal decoding. In this project, we studied deep neural networks with a range of different architectures for the purpose of decoding four imagined tasks from raw EEG taken with 22 electrodes. First, two purely CNN architectures with different network depths were considered. Next, performance of several architectures based on LSTM and GRU was studied. The experiments have shown that the best testing accuracy of 62.8% is achieved by using Deep ConvNet. This is unexpected because RNNs are known to handle temporal series, like EEG, better than CNNs.
Keywords: deep neural networks, convolutional neural networks, recurrent neural networks
Technical skills: Keras, TensorFlow, Python
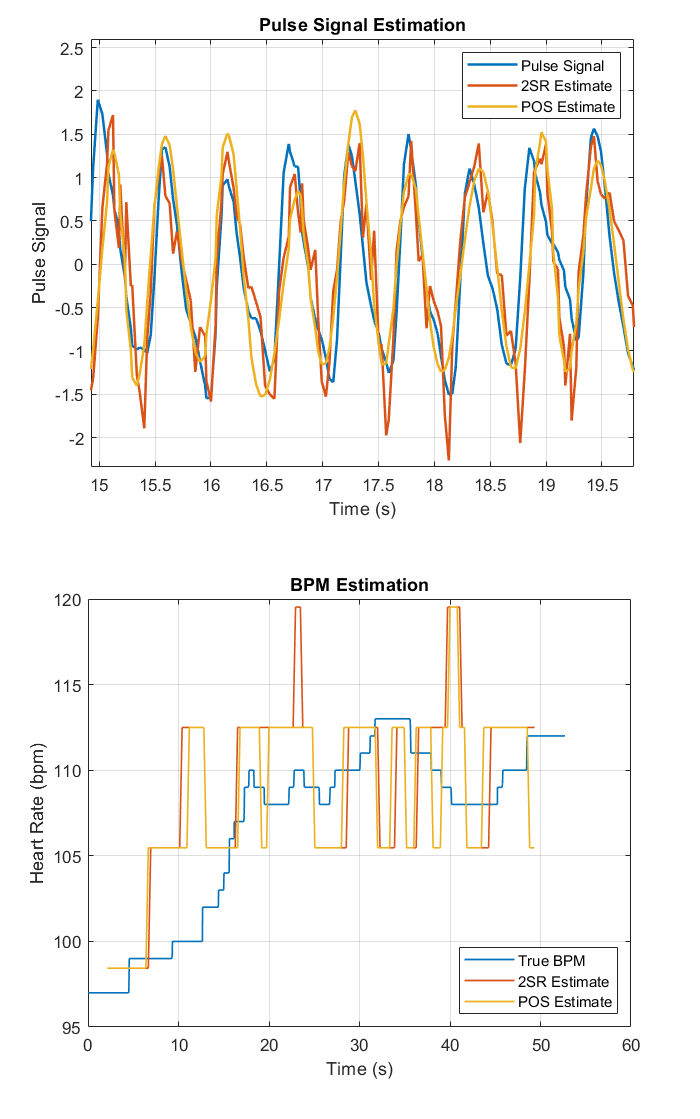
Remote PPG with POS and 2SR
(joint work with J. Bunton)
We explore the task of remote photo-plethysmography (rPPG), where we use standard RGB videos to estimate a pulse signal of a human subject. We construct a simple proof-of-concept algorithmic pipeline using both the Spatial Subspace Rotation (2SR) and Plane-Orthogonal-to-Skin (POS) methods, requiring only one initial skin-pixel identification step. We then verify output with a small sample from two data sets, and discuss potential areas for improvement.
Keywords: image processing, SVM, living skin tissue segmentation, remote photoplethysmography
Technical skills: MATLAB